About the project
Sub-project: AI-supported localization and fine positioning of load handling and load transfer devices in intralogistics as a supplement to existing robot systems
Project description
The "SmartPos" project is developing an innovative solution for the precise fine positioning of automated guided vehicles (AGVs) and mobile robots. Current systems face numerous challenges: Mechanical centering causes high costs, commissioning times are long and the requirements for ground conditions are high. Everyone knows the difficulties of parking a car - with mobile robots, a load must also be transferred after parking, which means that accuracy must be very high. These weaknesses lead to inefficiencies and susceptibility to faults in intralogistics material transfer.
SmartPos relies on the use of sensors and artificial intelligence (AI) to detect the exact position of the load pick-up relative to the station and to compensate for errors caused by tolerances and uneven floors. The system enables the stations to be recognized without any artificial markers and to adapt autonomously to different environmental conditions.
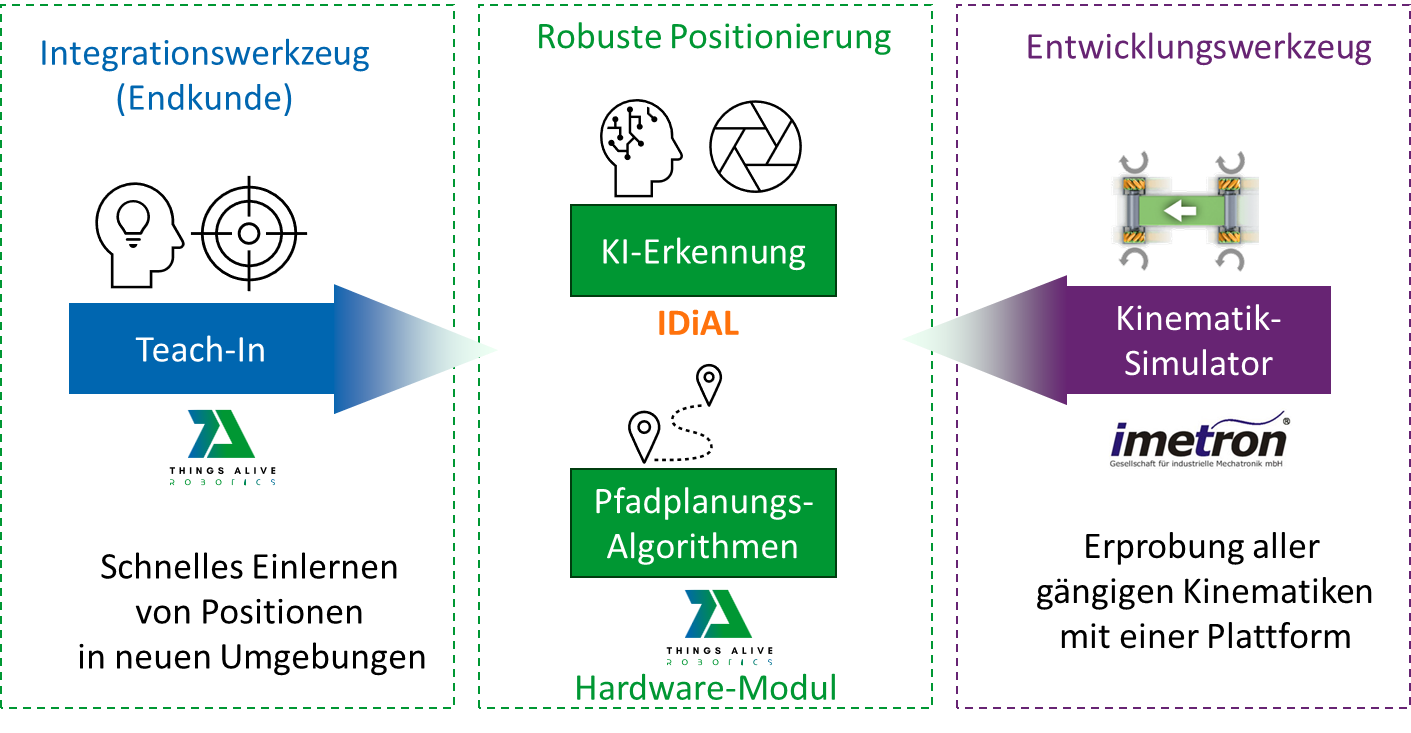
SmartPos is designed to minimize structural and spatial requirements, which simplifies integration into existing systems and reduces the cost of automating material flow processes. The result is a hardware component with associated configuration software, which enables simple integration. This not only increases the efficiency of material transfer, but also increases accessibility for small and medium-sized companies. SmartPos aims to increase the level of automation in logistics and create new opportunities for integrating autonomous systems into industrial processes.
Funding

Funding code
KK5119004GR4


